Չինական բարձրորակ ՄԻԳ եռակցման ռոբոտ՝ չժանգոտվող պողպատի եռակցման համար







Ռոբոտի մարմին
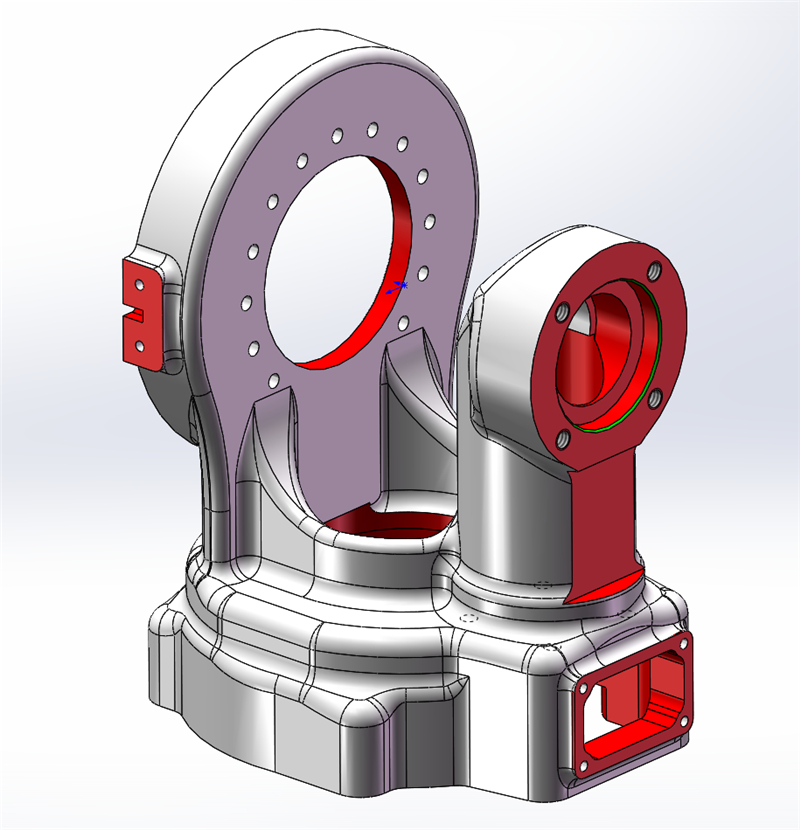
JHY ռոբոտը հիմնականում փոխվում է ձուլման գործընթացում և մարմնի մանրամասն նախագծման մեջ: Մեր հետազոտությունների և զարգացման թիմը բազմաթիվ նորարարություններ է կատարել ռոբոտի մարմնի նախագծման մեջ՝ ունենալով տասից ավելի նոր գյուտի արտոնագրեր:
Օրինակ՝ վեցերորդ առանցքը մշակվել է բարձր ճշգրտությամբ փոխանցման մեխանիզմով և նախագծվել են ամրանավոր ձողեր, ինչպես նաև վեցերորդ անիվի ելքային սկավառակը ընդունել է առանց փոխանցման մեխանիզմի դիզայն, ինչը զգալիորեն բարելավել է ռոբոտի ճշգրտությունն ու կայունությունը: Նույնիսկ եթե եռակցման այրիչը աշխատում է դժվար դիրքում, այն դեռ կարող է ապահովել կայունություն և առանց ցնցումների: Այս կետը հաստատվել է մեր ներքին հաճախորդների կողմից:
Ռոբոտի մարմինը արտադրվում է ձուլման տեխնոլոգիայով, ինչը մեր ռոբոտներին դարձնում է բարձր խտությամբ և թեթև։ Առջևի թևը կարող է լինել ավելի նեղ և երկար, վերին թևի և առջևի թևի միջև հարաբերակցությունը մոտ է ոսկե հարաբերակցությանը, ուստի շարժումն ավելի ճկուն և արագ է։
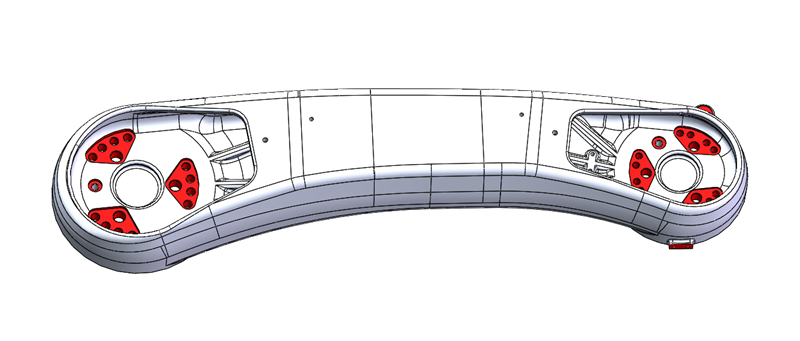
Եզրագծային դիզայն
Ռոբոտի ուղիղ առջևի թևի դիզայնն ավելի պարզ և էլեգանտ է։ Դիզայնի զգացողությամբ, որն ավելի է համապատասխանում եվրոպական շուկայի գեղագիտությանը։ Ռոբոտի մարմնի դիզայնը դիմել է մի շարք տեխնիկական արտոնագրերի համար, նոր ռոբոտի մարմինն ավելի կատարյալ է։
Լարերի լավագույն ապրանքանիշը
Ռոբոտի ներքին լարերը և միակցիչները պատրաստված են ճապոնական առաջատար ապրանքանիշերի կողմից՝ DYEN, TAIYO, նույն ABB և Fanuc:
Տերմինալ՝ իտալական Yierma ապրանքանիշ։
Սերվոշարժիչի / դրայվերի / ռեդուկտորի առաջատար ապրանքանիշեր
Նրանցից յուրաքանչյուրը օգտագործում է Չինաստանի առաջատար ապրանքանիշերը։ Յուրաքանչյուր ապրանքանիշ երկար ժամանակ փորձարկվել և ուսումնասիրվել է վերջնական որոշում կայացնելուց առաջ՝ ապահովելու համար, որ այս ապրանքանիշերը հարմար են մեր ռոբոտների օգտագործման համար, և որ դրանց որակն ու աշխատանքը կայուն ու հուսալի են։
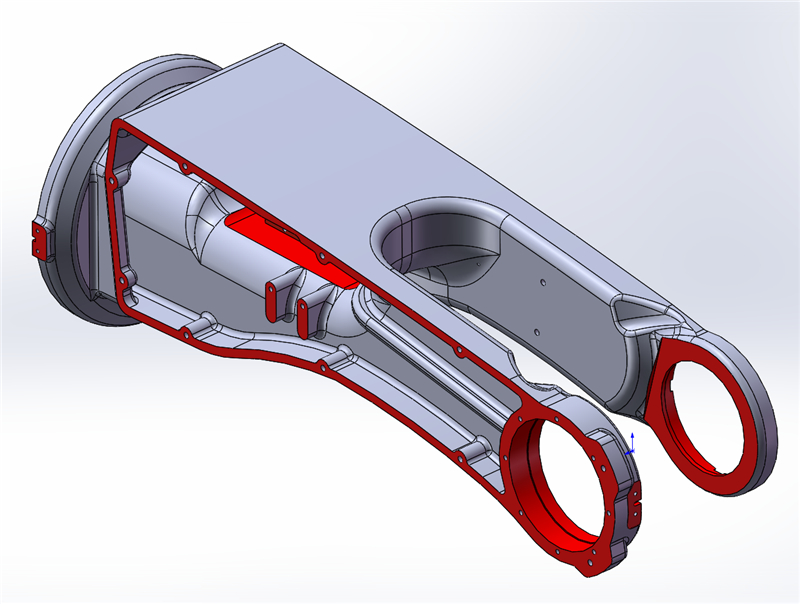
J1 և J2 առանցքները նախագծված են երեք էքսցենտրիկ լիսեռներից՝ մինչև 65 Նմ պտտող մոմենտով, ինչը նվազեցնում է փոխանցման մեխանիզմի մաշվածությունը և մեծացնում ռեդուկտորի ծառայության ժամկետը: JHY ռոբոտ J1 և J3 առանցքային ռեդուկտորները ներկայումս Չինաստանում ամենաբարձր կոնֆիգուրացիան են:
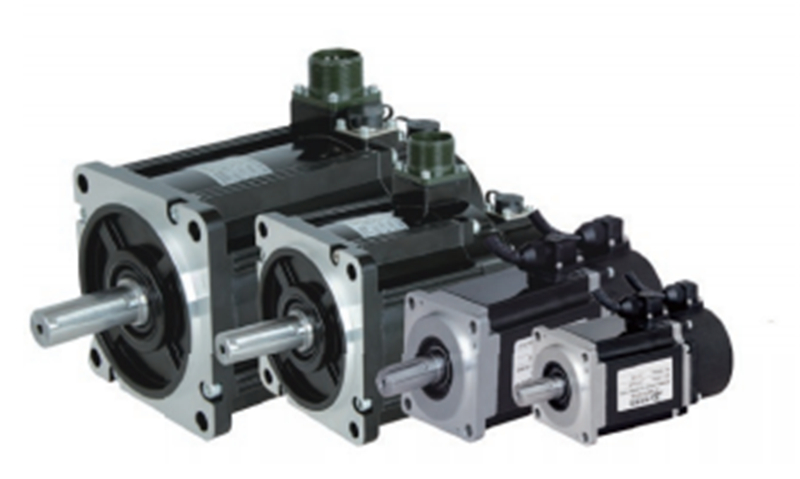
Սերվոշարժիչի մասին, հիմա մենք ռոբոտների համար օգտագործում ենք առավելագույնը 3 կՎտ հզորությամբ շարժիչը։
1.8 մ և 2 մ ռոբոտների համար 1-ին և 2-րդ առանցքների համար անհրաժեշտ շարժիչ ուժն ավելի մեծ է, և շարժիչի հզորության նկատմամբ պահանջները նույնպես ավելի բարձր են։
Բարձր ճշգրտության և բազմաբնույթ սպեցիֆիկացիաներով շարժիչները կարող են լիովին բավարարել մեր ռոբոտի կիրառման պահանջարկը։

3 տարի/7500 ժամ՝ առանց սպասարկման
Սպասարկումը պարզ է, հաճախորդները կարող են հեշտությամբ կառավարել դրանք։
Այլ արտոնագրեր և նախագծեր
6-առանցքային երկրորդային փոխանցման տուփը փոխարինվել է երկու գոտիային միացմամբ, մեծացրել է փոխանցման հարաբերակցությունը և լուծել 6-առանցքային չափազանց արագ և անճշգրիտ շարժման խնդիրը: Վեցերորդ առանցքի ելքային սկավառակը նախագծված է առանց ատամնանիվների, բարձր ճշգրտության փոխանցման մեխանիզմով, ինչը բարելավում է վեցերորդ առանցքի շարժման ճշգրտությունը... Այս պահին մենք ունենք եռակցման ռոբոտի ավելի քան 30 արտոնագիր:
Տեսանյութ
Պարամետրեր
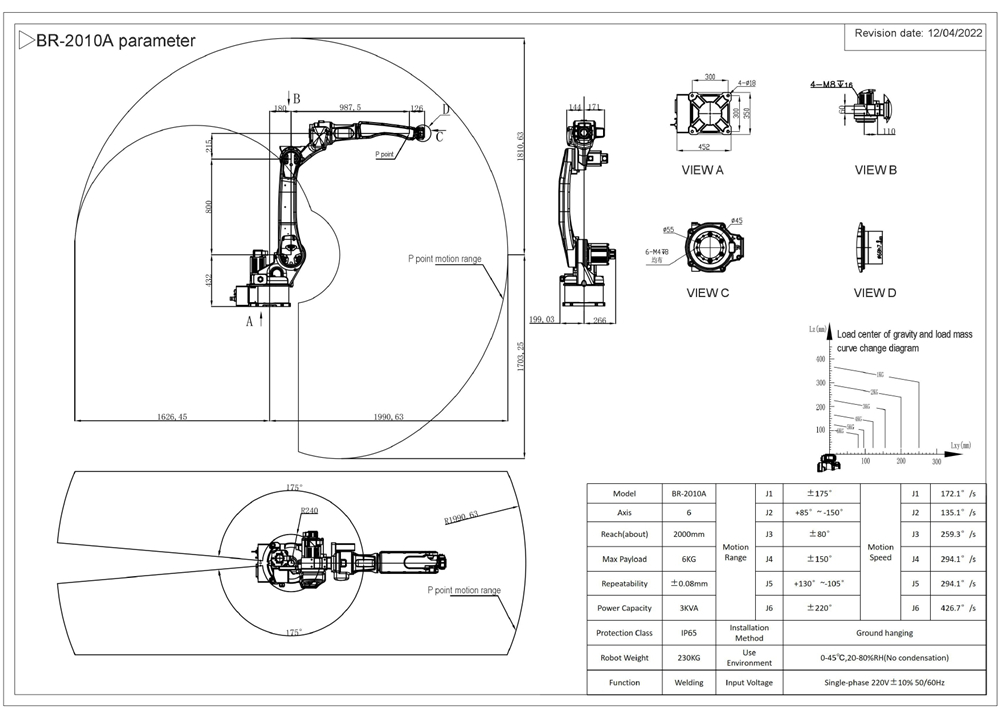
| Մոդել | BR-2010A | Շարժման միջակայք | J1 | ±175° | Շարժման արագություն | J1 | 172.1°/վ |
| Առանցք | 6 | J2 | +85°~ -150° | J2 | 135.1°/վ | ||
| Հասանելիություն (մոտավորապես) | 2000 մմ | J3 | ±80° | J3 | 259.3°/վ | ||
| Առավելագույն բեռնվածություն | 6 կգ | J4 | ±150° | J4 | 294.1°/վ | ||
| Կրկնելիություն | ±0.08 մմ | J5 | +130°~-105° | J5 | 294.1°/վ | ||
| Հզորություն | 3 կՎԱ | J6 | ±220° | J6 | 426.7°/վ | ||
| Պաշտպանության դաս | IP65 | Տեղադրման մեթոդ | Գետնից կախված | ||||
| Ռոբոտի քաշը | 230 կգ | Օգտագործել միջավայրը | 0-45℃, 20-80%RH (առանց խտացման) | ||||
| Ֆունկցիա | Եռակցում | Մուտքային լարում | Միաֆազ 220V ± 10% 50/60Hz | ||||
Ապրանքների կատեգորիաներ
-

6 առանցք ցածր ցայտքի ՄԻԳ եռակցման ռոբոտի 1800 մմ հեռավորություն
-

6 առանցք ունեցող MIG MAG եռակցման ռոբոտի 1500 մմ շառավղով ...
-

Բարձրորակ եռակցման ռոբոտ, որն օգտագործվում է կահույքի եռակցման համար
-

JHY 6 առանցք ունեցող ռոբոտ-բազուկ արդյունաբերական ավտոմատ աղեղային մ...
-

2000 մմ հասանելիությամբ եռակցման ռոբոտ՝ ածխածնային եռակցման համար...
-

ՄԻԳ եռակցման ռոբոտ՝ 2000 մմ բացվածքով չժանգոտվող պողպատի համար...